



产品详情

全模块机器人焊接解决方案。
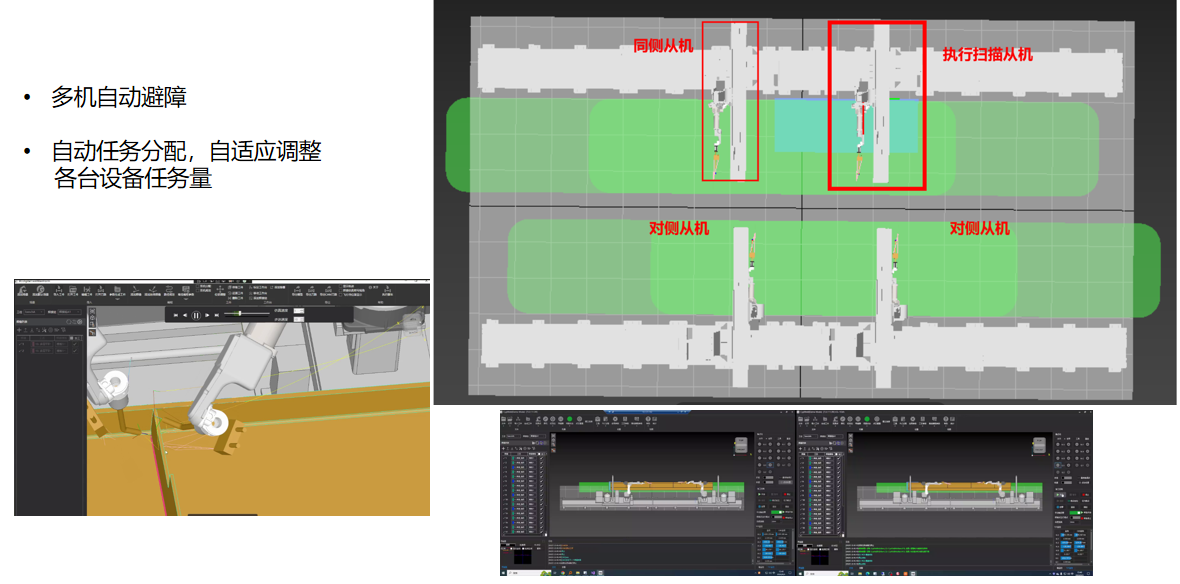
模型导入/逆向建模+专家算法驱动的离线编程
基于实时操作系统的控制内核
前馈与反馈结合的焊缝跟踪系统
自研3D几何建模引擎
结合场景自适应的视觉传感器与焊缝处理算法

痛点
现场无三维模型图纸
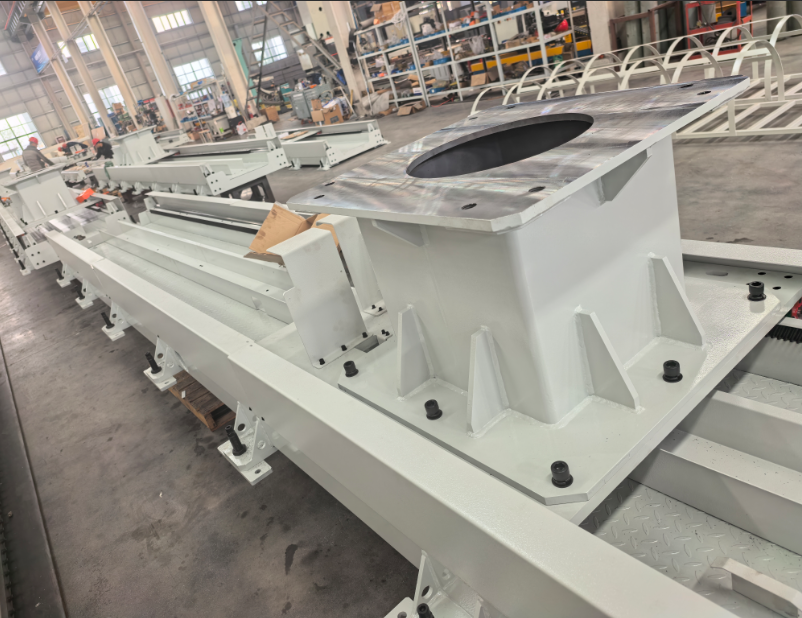
工件任意摆放
无免示教焊接设备
方案
基于大线扫相机的逆向建模功能解决无模型导入,支持在工位区域内任意摆放工件
深入对接船厂图纸,二维模型转化三维模型,读取工艺文件自动匹配工艺。
对于倾斜工件,实现爬坡焊工艺,提升了曲线焊缝成型质量
关键词:





在线咨询
推广焊接和切割自动化相关技术。
✓ 24小时内回复
✓ 现场调试
✓ 售后服务人员提供周到服务
✓ 官方网站: www.xbjqrkj.cn
Copyright © 2024 新宝机器人科技(南通)有限公司 All Rights Reserved | 苏ICP备19061139号

