PRODUCTS CENTER


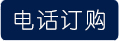
 焊接变位机的用途 焊接变位机主要用途: 焊接变位机是一种通用、以实现环缝焊接为主的焊接设备。可配用氩弧焊机(填丝或不填丝)、熔化极气体保护焊机 (C02/MAG/MIG焊机)、等离子焊机等焊机电源并可与其它机组成自动焊接系统。该产品主要由旋转机头、变位机构以及控制器组成。旋转机头转速可调,具有独立调速电路,拨码开关直接预置焊缝长度。倾斜角度可根据需要调节。焊枪可气动升降。
焊接变位机的用途 焊接变位机主要用途: 焊接变位机是一种通用、以实现环缝焊接为主的焊接设备。可配用氩弧焊机(填丝或不填丝)、熔化极气体保护焊机 (C02/MAG/MIG焊机)、等离子焊机等焊机电源并可与其它机组成自动焊接系统。该产品主要由旋转机头、变位机构以及控制器组成。旋转机头转速可调,具有独立调速电路,拨码开关直接预置焊缝长度。倾斜角度可根据需要调节。焊枪可气动升降。
焊接变位机的技术要求:
1、回转驱动
(1)回转驱动应实现无级调速,并可逆转。
(2)在回转速度范围内,承受较大载荷时转速波动不超过5%。
2、倾斜驱动
(1)倾斜驱动应平稳,在较大负荷下不抖动,整机不得倾覆。较大负荷Q超过25kg的,应具有动力驱动功能。
(2)应设有限位装置,控制倾斜角度,并有角度指示标志。
(3)倾斜机构要具有自锁功能,在较大负荷下不滑动,安全可靠。
3、其他
(1)变位机控制部分应设有供自动焊用的联动接口。
(2)变位机应设有导电装置,以免焊接电流通过轴承、齿轮等传动部位。导电装置的电阻不应超过1mΩ,其容量应满足焊接额定电流的要求。
(3)电气设备应符合GB/T 4064的有关规定。
(4)工作台的结构应便于装卡工件或安装卡具,也可与用户协商确定其结构形式。
(5)较大负荷与偏心距及重心距之间的关系,应在变位机使用说明书中说明。
焊接变位机的具备性能:
(1)焊接变位机械和焊机变位机械要有较宽的调速范围焊接运行速度,以及良好的结构刚度。
(2)对尺寸和形状各异的焊件,要有适用性。
(3)在传动链中,应具有反行程自锁传动,以免动力源突然切断时,焊件因重力作用而发生事故。
(4)与焊接机器人和准确焊接作业配合使用的焊件变位机械,视焊件大小和工艺方法的不同,其到位精度(点位控制)和运行轨迹精度(轮廓控制)应控制在0.1—2mm之间,精度应可达0.01mm。
(5)回程速度要快,但应避免产生冲击和振动。
(6)有良好的接电、接水、接气设施,以及导热和通风性能。
(7)整个结构要有良好的密闭性.以免焊接飞溅物的损伤,对散落在其上的焊渣、药皮等物.应易被清除。
(8)焊接变位机械要有联动控制接口和相应的自保护功能集中控制和相互协调动作。
(9)工作台面上应刻有安装基线,装各种定位工件和夹紧机构。
(10)兼作装配用的焊件变位机械抗冲击性能。并设有安装槽孔,能方便地按其工作台面要有较高的强度和抗冲击性能。
(11)用于电子束焊、等离子弧焊、激光焊和钎焊的焊件变位机械,应满足导电、隔磁、绝缘等方面的特殊要求。
2024-07
综上所述,工业机器人配备行走轨道是工业自动化发展的必然趋势。行走轨道不仅拓展了机器人的活动范围、提高了生产精度和效率,还增强了机器人的适应性和灵活性。随着技术的不断进步和创新,我们有理由相信工业机器人在未来将在更广泛的领域发挥重要作用。
2024-07
三维柔性焊接平台凭借其高度灵活性和适应性、高效率、高稳定性等特点,成为现代制造业的宠儿。在未来,随着技术的不断进步和应用的不断拓展,三维柔性焊接平台将在制造业中发挥更加重要的作用。如果您是制造业从业者,不妨关注三维柔性焊接平台的发展动态,为您的企业注入新的活力!
2024-02
免示教免编程的焊接机器人适合需要大量焊接工作的行业,如汽车、铁路、航空、管道等。其优点在于能够提高焊接效率、降低成本、保证质量,是现代化制造中不可或缺的重要设备之一。
2022-08
我们一直在路上,祝中国焊接装备产业链-供应链合作交流论坛会圆满成功。